
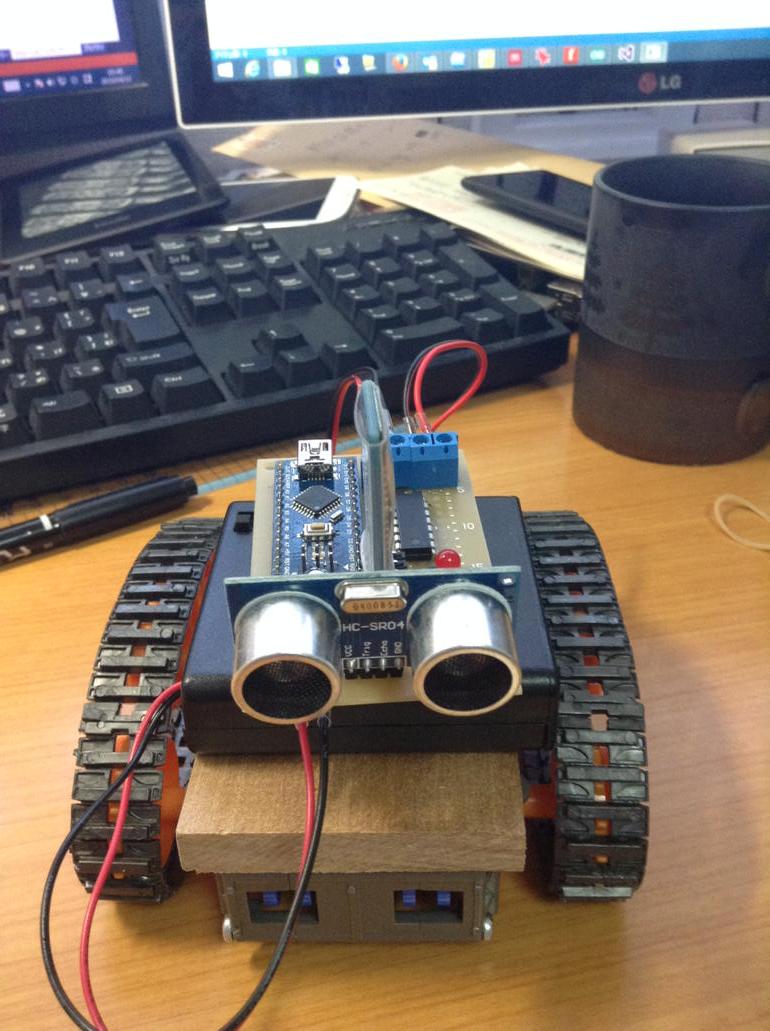
回路図はまた後で書くとして、Arduino Nano を使った Arduino 戦車です。正確には Arduino Nano の互換機なのですが、さっくりと動きました。
Arduino 戦車3号機
モータードライバに L293D を使って、無線化は HC-05 で 2号機と同じ構成です。5×7 cm のユニバーサル基板に、Arduino Pro Mini ごと乗っかっています。モーターへの給電を別系統にしようとおもったけど、面倒になって Arduino の 5V から取り出し。それのコネクタがないので、Vin/GND に AAAx4 を繋げてしまいます。
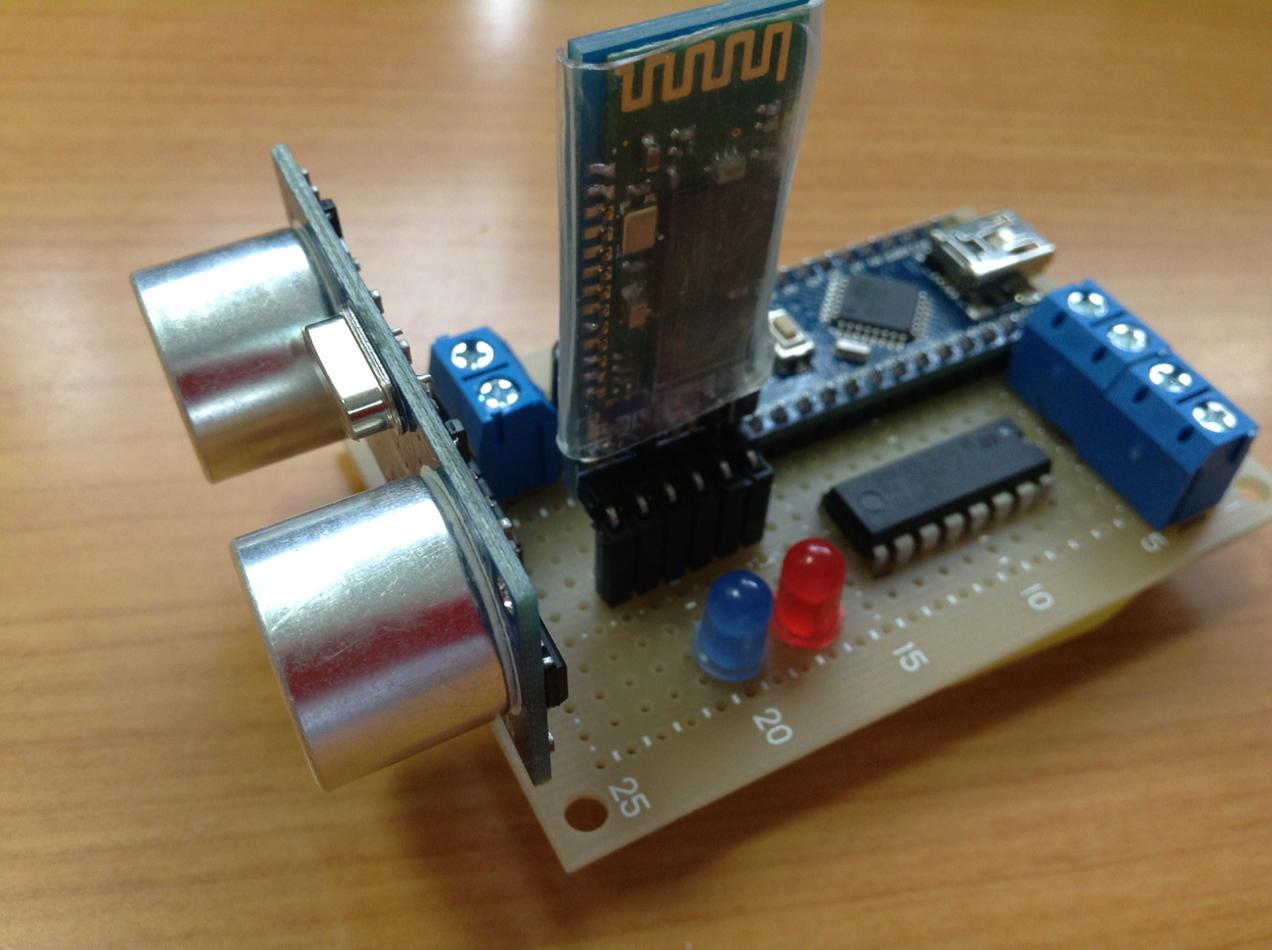
前?に乗っけているのは、超音波の距離センサ(HC-SR04)です。壁にぶつからないとか、そういうのに使う訳ですが、スケッチのほうはまだできていないので乗っけているだけ。
ユニバーサル基板自体が、Arduino Uno とそう変わらない大きさなので、モーターシールドを自作ても大きさはあまり変わりません。まあ、一体型になっているので、取扱い?が楽なのと、戦車のプラモデルに乗っけるのに小型化してみたかったというところです。ユニバーサル基板だと配線の関係で、かなりしんどいので、これから先はプリント基板を作ることになるかなと、KiCad を勉強中。
ただ、ここまでするんだったら、Mini を使わずに Arduino Uno のマイコン部分だけを使って適当なモータードライブと乗せて作るといいんだろうなと。それはまた別途作ってみよう。
最終的には、この構成に
- サーボモーター制御 x4 or x6
- 加速度センサ、ジャイロセンサ
も乗せていく予定です。
ひとまず、1,2,3号機を同時に動かしたいので、板とギアボックスで、あと2台さっさと作ります。BL モジュールは、HC-06 が x5 あるので、それを使っていきましょう。
