
開催概要 | 2025国際ロボット展 https://irex.nikkan.co.jp/overview/ に行ってきたので、この感想文です。
みなさん、歩く方のロボットが目当てっぽいのですが、私の場合ロボットアームが目当てなのでちょっと視点がずれています…というか異なります。この手の産業展は写真不可が多いのですが、ロボット展は可なんですね。なので、写真付きです。
ちなみに、面倒だったのでセミナーのほうは行ってません。歩くロボットの展示はセミナーが多かったみたいなので、何らかの予約をしていくと良いです。
最初の探したのが川崎重工です。四足のコンセプトロボットではなくて、以前展示されていた ROS で動作している歩行ロボット(確かピックアップ利用目的)の開発がどうなったのかな、というところです。


どうやら、実演を見逃してしまったようで「Kaleido(カレイド)」という形で開発されています。中味のが ROS2 かどうかは分かりません。
「踊らない」ヒト型ロボで逆転狙う日本勢 川崎重工、最新版を公開 – 日本経済新聞 https://www.nikkei.com/article/DGXZQOUC02BVH0S5A201C2000000/
結構注目を集めていたのが、NACHi https://www.nachi-fujikoshi.co.jp/ の産業ロボットです。会場でも相当数 NACHi バッグを持っている人がいます。
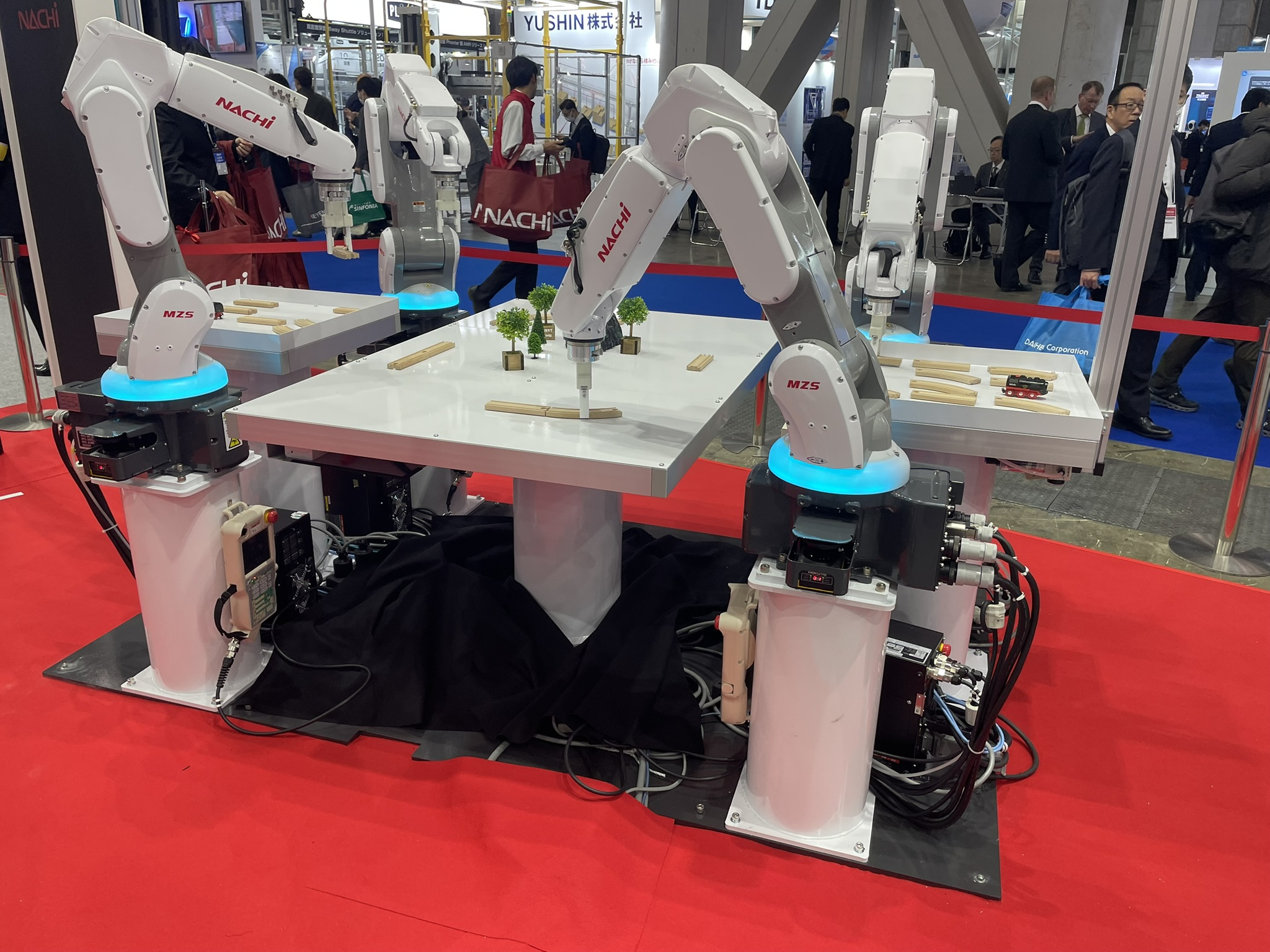
これが凄いのは、複数のロボットアームが協調動作をしているのですが、相互にぶつからないように作業ができています。これ、自動車の塗装や溶接だと事前プログラムで衝突を回避するのですが、不二越ロボットはリアルタイム(MZS OS だったか)で相互干渉を避けることができます。これは木製の線路かたずけを行っているデモですが、他にもボールやビスの片づけとか4,5台のロボットアームが協調動作するところが見られます。
「皆さんご存じデジタルツイン」の展示です。仮想空間にロボットアームや機器を配置させて、競合を避ける手法のひとつです。従来だと、実際の機器で動作範囲を指定していたのですが、現在はこのような仮想空間を利用します。という形で「デジタルツイン」です。

実際にはロボットアーム自体の物理量(振り回しやトルクとか)があるので、その許容範囲を計算するのと、作業台の上の道具の位置が若干ことなるとか、そういう差異を吸収しないといけません。そのあたりは、具体的にロボットアームの動作プログラムをしている方がぽろぽろと X のタイムラインにもいるので探してください。企業秘密なのでなかなか見つかりませんが、趣味ロボットを作っている方を漁ると出会えたりします。つまりは、仕事でもロボットだし、趣味でもロボットなわけです。
ロボット展なので、いわゆる「ロボット」が多いのですが、こういうのもロボットです。商品のピックアップを画像認識とローラーで判別して送り出すことができます。

Amazon のように多種多様なピックアップの場合、棚移動ロボットとロボットのような人間によるピックアップの組み合わせがよいのですが、この展示のようにある程度かたちが揃っている場合はベルトコンベア方式でピックアップすると高速にできます。たぶん、ローラーで商品判別をするパターンの応用だと思うのですが、見どころは手間のローラー部分ではなくて、裏のほうで動いているボールがたくさんついてるローラーのほうです。可動部分が多くて連続動作はどうなのだろう? と思ったりもしますが、かなりスムーズに動けます。
ソフトウェアとして Unity が使われています、の例です。HMD 対応のソフトウェア開発もそうなのですが、画像関係では Unity が欠かせません。Unity 自体の利用はゲーム業界が多いとは思うのですが、こういうリアルタイム動作の UI によく使われています。

同じ画像関係として Unreal Engine があるのですが、この手のロボットや画像研究展では Unity が使われていることが多いです。多分 C# と C++ の違いかなと思います。Unreal Engine で C++ を使ってがりがりやって、他との通信部分を作るのは辛いでしょう。そのあたりは、C# で豊富なライブラリを使った方が有利、ということです。Unity 自体のブースもロボット展に出ています。
もう、見飽きてしまった位の7軸ロボットですが、ピックアップ&協調動作と言う形で広く使われています。

この丸みをおびたデザインは、実はドイツの Industry 4.0 が発祥になります。Industry 4.0 は工場の自動化と同時に、ロボットが人と協調するときの安全性も進めていました。
インダストリー4.0とは?日本の製造業への応用やドイツの狙いをわかりやすく解説! | NTTドコモビジネス 法人のお客さま https://www.ntt.com/business/services/xmanaged/lp/column/industry-4-0.html
IoT とか工場のセンサーとか、自動発注システムとかも Industry 4.0 の一部ですね。それ以前は無骨で指や腕を持って行かれそうなデザインだったわけですが、このような形で丸みを帯びたカーブになっています。これだと指を挟むことがありません。ちょうど、歯医者の支持アームのようなものです。
もちろん、完全無人化の場合は、人間への配慮が必要がないのでこのての形状じゃないものも多いです。自動車の溶接や塗装アームとは異なる分野になります。
ちなみに写真を取り忘れてしまったのですが、ロボットアームの作業を「共創」するパターンがあります。先の MZS OS の場合は一社だけの協調作業ですが、「共創」する場合は、多様な会社のロボットアームを協調動作させることが目的になります。いろいろな会社が、その会社特有のアームを持ち出して、協調的に作業をできるというスタイルです。今回でも、このスタイルを主張する会社が2社ほどありました。
他社のロボットアームが AI などを使った自動化に重きを置くのですが、人力の操作に重きを置いたのが「人機一体」です。いわゆる従来型の人が操作するロボットアームになりますが、重機や臨機応変な作業にはこれが有効になります。
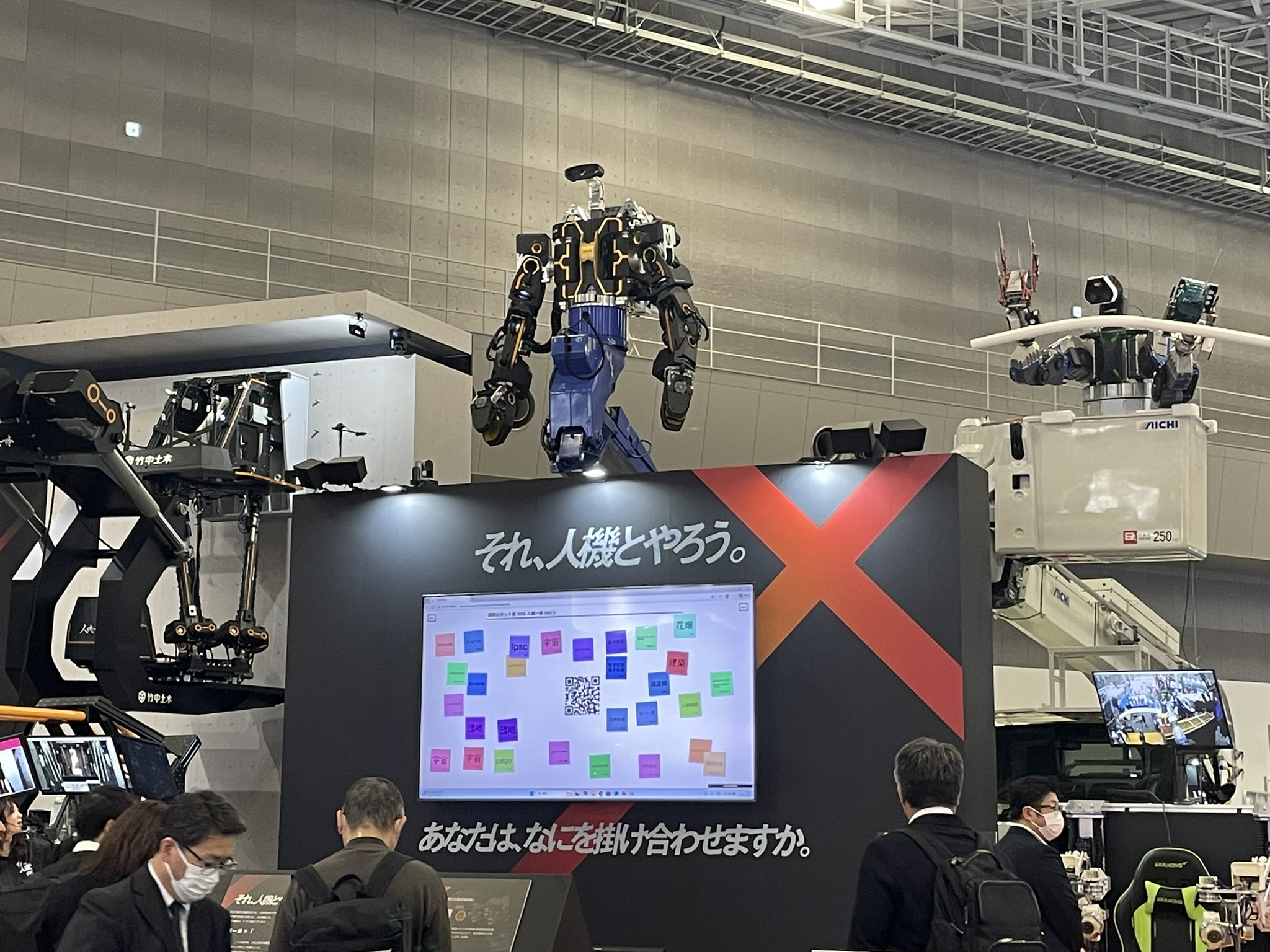

おそらく、一番の売りは「フィードバックが来るようになった」です。HMD で遠隔操作ができると同時に、アームが何かに触ったときに、人間の操作アームのほうにフィードバックが入ります。これができないと、押したり引いたりの力加減を「視界」だけで行なわなければいけません。いわゆる触覚です。これは遠隔地の電板を開いてブレーカーを操作しているところです。これで高所や高圧線に近いところでも人間は安全に作業ができるということです。まあ、ロボットも結構な値段がするでしょうが、人間の命のほうが高いですからね。場合によってはロボットが犠牲になるのです。
ちなみに、人機一体の缶バッチが売ってます。この手の展覧会でノベルティグッズを売っているのは初めて見ました。買っておけばよかった。ちょっとスルーしてしまいました。
ワイヤー型のロボットアームがありました。このワイヤー型は7軸ロボットに押されてしまっていますが、実は非常に高速に動きます。

これ、ワイヤーの自重がロボットアーム型よりも軽いので、凄く素早く動くんですよね。慣性力が少ないのです。しかも、巻き取りのステッピングモーターだけで済ませられるというのが特徴です。おそらく、重さ制限はあるのですが、こんな形で液体ボトルのぴくアップができます。他にも、この展覧会では見なかったですが、食品業界で使われる三軸のアームがあります。これも凄い高速で動くのでお薦めです…何に薦めるかわかりませんが。
この手のロボット展ですが、以前は物体認識の画像研究のシンポジウムと組み合わせるのが必要だったのですが、いまだと普通に組み込まれています。画像認識(キーエンスの薬品識別とか)は別な分野でもあるのですが、ロボットアームについても必ず組み込まれるようになっています。特に、人との協調ロボットには必須の機能ですよね。
そんな訳で、金曜日、土曜日とまだ展示会があるので、都合をつけてビックサイトに行ってみるのもよいです。
