
Arduino で Bluetooth シリアル変換モジュール(HC-05)を使う | Moonmile Solutions Blog
http://www.moonmile.net/blog/archives/6819
の続きです。
ストアアプリで作ると、ノートPCでちまちま(Surfaceでもいいけど)やらないちけないので、スマートフォンから動かせるようにします。と言いますか、せっかく Xamarin.Android があるんだから、それで RFCOMM してしまおうという訳です。
最近、中古で購入した Galaxy S3 は、Android 4.1.2 までしか上がらないので BLE は使えないのですが、従来の Bluetooth は使えます。まあ、接続先が Bluetooth 2.0 でシリアル通信なのでこれでok。
内容的には、以下を参考にして作っています。
Connect to a Bluetooth Serial Device with Xamarin.Android
http://brianpeek.com/post/Connect-to-a-Bluetooth-Device-with-XamarinAndroid
Android アプリの画面はこんな感じ。

Android で RFCOMM を使う
Xamarin.Forms を使うと、何故か Android.Bluetooth 名前空間が参照できないので、ノーマルな Xamarin.Forms で作っています。
BluetoothAdapter.DefaultAdapter でデフォルトの Bluetooth を取ってきて、CreateRfcommSocketToServiceRecord メソッドで RFCOMM 用のソケットを作ります。データの送受信はこれに対して、OutputStream と InputStream を使えば ok です。
[Activity(Label = "AndroidBluetooth", MainLauncher = true, Icon = "@drawable/icon")]
public class MainActivity : Activity
{
TextView text1;
EditText edit1;
protected override void OnCreate(Bundle bundle)
{
base.OnCreate(bundle);
// Set our view from the "main" layout resource
SetContentView(Resource.Layout.Main);
// Get our button from the layout resource,
// and attach an event to it
Button button = FindViewById<Button>(Resource.Id.MyButton);
button.Click += button_Click;
Button btnSend = FindViewById<Button>(Resource.Id.button1);
btnSend.Click += btnSend_Click;
text1 = FindViewById<TextView>(Resource.Id.textView1);
edit1 = FindViewById<EditText>(Resource.Id.editText1);
Button btn2 = FindViewById<Button>(Resource.Id.button2);
btn2.Click += btn2_Click;
FindViewById<Button>(Resource.Id.button3).Click += clickMotorOn;
FindViewById<Button>(Resource.Id.button4).Click += clickMotorOff;
}
BluetoothSocket _socket;
/// <summary>
/// 接続
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
async void button_Click(object sender, EventArgs e)
{
try
{
BluetoothAdapter adapter = BluetoothAdapter.DefaultAdapter;
if (adapter == null)
throw new Exception("No Bluetooth adapter found.");
if (!adapter.IsEnabled)
throw new Exception("Bluetooth adapter is not enabled.");
BluetoothDevice device = (from bd in adapter.BondedDevices
where bd.Name == "HC-05"
select bd).FirstOrDefault();
if (device == null)
throw new Exception("Named device not found.");
_socket = device.CreateRfcommSocketToServiceRecord(UUID.FromString("00001101-0000-1000-8000-00805f9b34fb"));
await _socket.ConnectAsync();
text1.Text = "接続しました";
}
catch (Exception ex)
{
text1.Text = ex.Message;
}
}
async void SendCommand(string text)
{
// 8文字にして送る
if (text.Length < 8)
{
text = text.PadRight(8, '*');
}
else
{
text = text.Substring(0, 8);
}
var buffer = System.Text.Encoding.UTF8.GetBytes(text);
// 送信
await _socket.OutputStream.WriteAsync(buffer, 0, buffer.Length);
// 受信待ち
var buffer2 = new byte[8];
for (int i = 0; i < buffer2.Length; i++)
{
int n = _socket.InputStream.ReadByte();
buffer2[i] = (byte)n;
}
string str = System.Text.Encoding.UTF8.GetString(buffer2);
text1.Text = str;
}
/// <summary>
/// 送信
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
void btnSend_Click(object sender, EventArgs e)
{
string text = edit1.Text ;
SendCommand(text);
}
void clickMotorOn(object sender, EventArgs e)
{
string text = edit1.Text;
SendCommand("m1on");
}
void clickMotorOff(object sender, EventArgs e)
{
string text = edit1.Text;
SendCommand("m1off");
}
/// <summary>
/// 切断
/// </summary>
/// <param name="sender"></param>
/// <param name="e"></param>
void btn2_Click(object sender, EventArgs e)
{
_socket.Close();
_socket = null;
text1.Text = "切断しました";
}
}
コマンド自体は、Arduino が受けやすいように8バイト固定にしています。
実験して分かったのですが、Arduino からは1バイトずつ送っているので、受信する Android で ReadAsync を使うと最初の1バイトだけ先に受信してしまいます。このあたりはバッファを先読みして8バイト溜まったら読み込めばいいのですが、面倒ので1バイトずつ読み込んでいます。
// 受信待ち
var buffer2 = new byte[8];
for (int i = 0; i < buffer2.Length; i++)
{
int n = _socket.InputStream.ReadByte();
buffer2[i] = (byte)n;
}
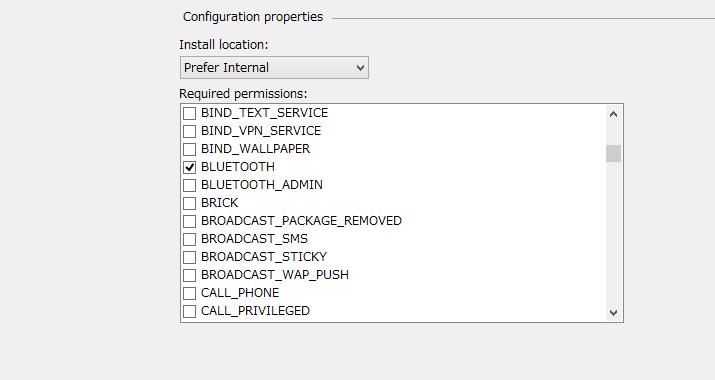
あと、プロジェクトの Android Manifest を開いて BLUETOOTH にチェックを入れます。
これがうまくいくと、Android スマートフォンからモーター制御ができるようになります。
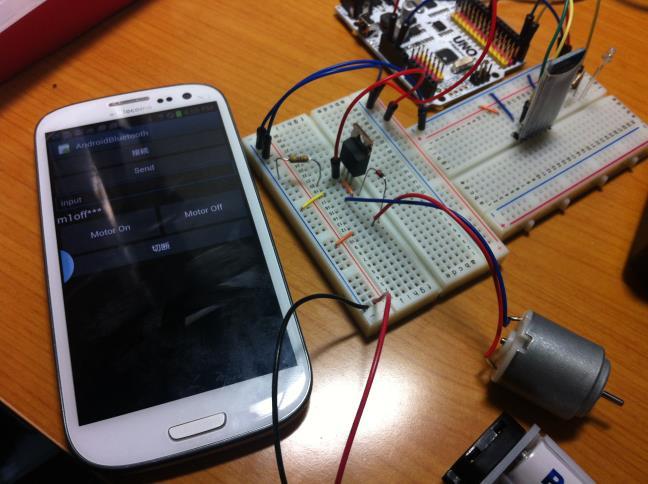
ちなみに、上の方に写っている白いボードは「Freaduino UNO Rev1.8」です。Arduino Uno にサーボ用のシールドを作るのが面倒で買ってしまいました。手元の meArm を制御している
Assembly | Adafruit 16-Channel Servo Driver with Arduino | Adafruit Learning System
https://learn.adafruit.com/16-channel-pwm-servo-driver/assembly
とは違うけどデジタルピンに1対1で対応しているので、Arudino IDE で Servo ライブラリがそのまま使えます。

