
プチロボ事始め | Moonmile Solutions Blog
http://www.moonmile.net/blog/archives/2416
プチロボで4軸構成にしてみる | Moonmile Solutions Blog
http://www.moonmile.net/blog/archives/2421
OpenCV を使ってエッジ抽出 | Moonmile Solutions Blog
http://www.moonmile.net/blog/archives/2452
の続き
テンプレートマッチングの前に、SVM というか、OpenCV で顔認識を試してみます。
ひとまず、opencv.jp の sample コードを見ながらざっとコーディング。
#include <stdlib.h>
#include "opencv/cv.h"
#include "opencv/highgui.h"
int main( int argc, char **argv )
{
cvNamedWindow( "Face01in", CV_WINDOW_AUTOSIZE );
cvNamedWindow( "Face01out", CV_WINDOW_AUTOSIZE );
static CvScalar colors[] = {
{{0, 0, 255}}, {{0, 128, 255}},
{{0, 255, 255}}, {{0, 255, 0}},
{{255, 128, 0}}, {{255, 255, 0}},
{{255, 0, 0}}, {{255, 0, 255}}
};
CvCapture *capture;
if ( argc == 1 ) {
capture = cvCreateCameraCapture(0);
} else {
capture = cvCreateFileCapture( argv[1] );
}
IplImage *frame = NULL;
IplImage *frameGray = NULL;
const char *cascade_name = "haarcascade_frontalface_default.xml";
CvHaarClassifierCascade *cascade =
(CvHaarClassifierCascade *) cvLoad (cascade_name, 0, 0, 0);
while ( 1 ) {
frame = cvQueryFrame( capture );
if ( !frame ) break;
if ( frameGray == NULL ) {
frameGray = cvCreateImage(cvGetSize(frame), IPL_DEPTH_8U, 1);
}
CvMemStorage *storage = 0;
storage = cvCreateMemStorage (0);
cvClearMemStorage (storage);
cvCvtColor (frame, frameGray, CV_BGR2GRAY);
cvEqualizeHist (frameGray, frameGray);
CvSeq *faces;
faces = cvHaarDetectObjects (frameGray, cascade, storage, 1.11, 4, 0, cvSize (40, 40));
// (5)検出された全ての顔位置に,円を描画する
for (int i = 0; i < (faces ? faces->total : 0); i++) {
CvRect *r = (CvRect *) cvGetSeqElem (faces, i);
CvPoint center;
int radius;
center.x = cvRound (r->x + r->width * 0.5);
center.y = cvRound (r->y + r->height * 0.5);
radius = cvRound ((r->width + r->height) * 0.25);
cvCircle (frameGray, center, radius, colors[i % 8], 3, 8, 0);
}
cvReleaseMemStorage (&storage);
cvShowImage( "Face01in", frame );
cvShowImage( "Face01out", frameGray );
char ch = cvWaitKey(33);
if ( ch == 27 ) break;
}
cvReleaseCapture( &capture );
cvDestroyWindow( "Face01in" );
cvDestroyWindow( "Face01out" );
return 0;
}
opencv.jp – OpenCV: 物体検出(Object Detection)サンプルコード –
http://opencv.jp/sample/object_detection.html#face_detection
を参考にして、cvHaarDetectObjects 関数で顔検出をします。
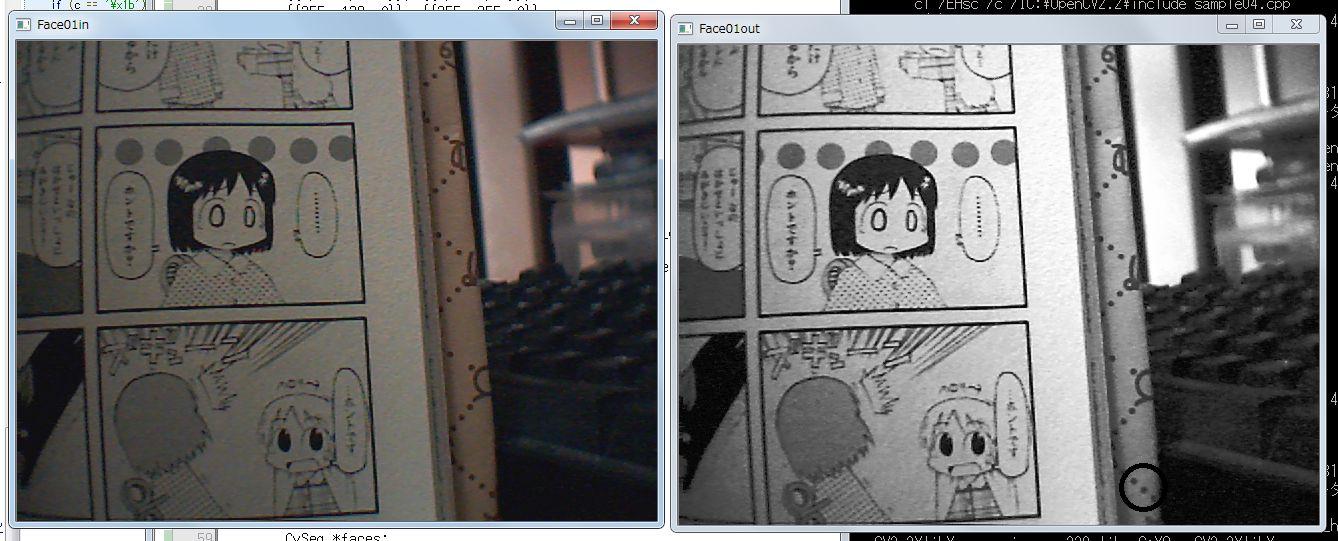
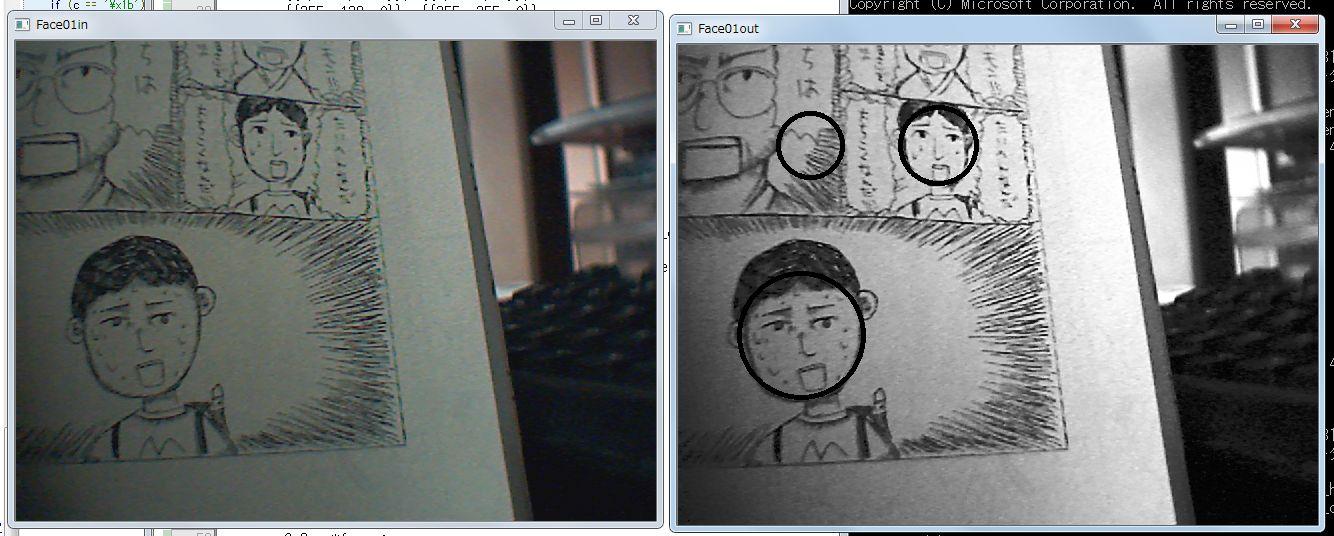
あらかじめ、学習済みの「haarcascade_frontalface_default.xml」というファイルを使う訳ですが、いじわる的に下記のように漫画で試してみると…目の大きいキャラは駄目ですねw
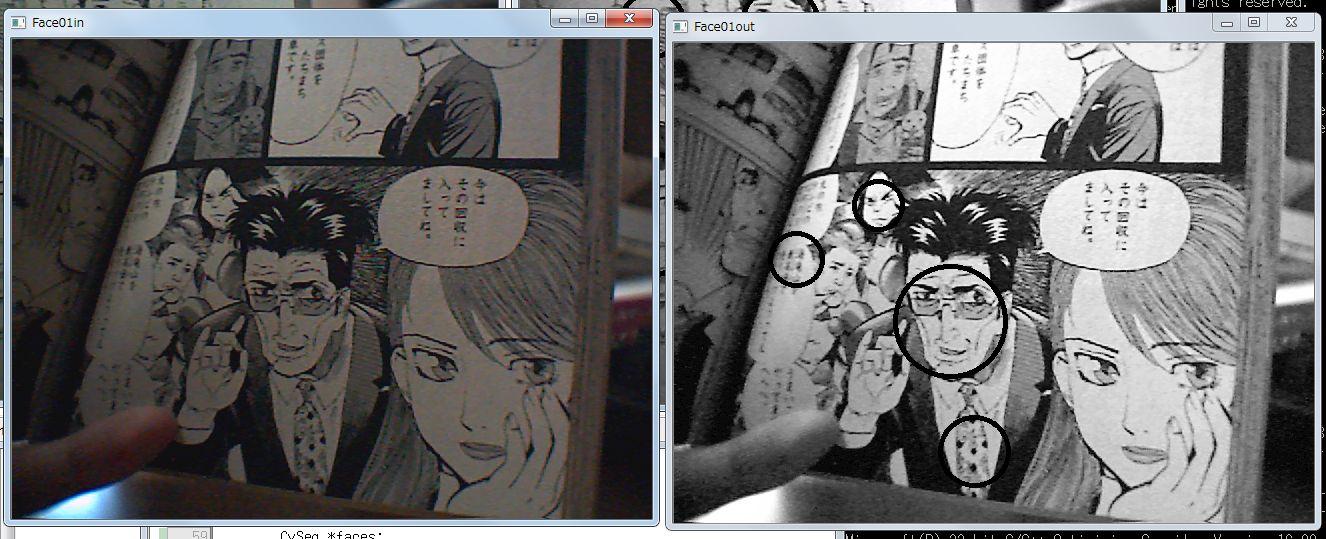
人を「顔」として認識するパターンと、学習済みの「顔」のパターンが違うわけで、実際には、^_^ のようなものも「顔」として人は認識できるので、何を以って「顔」とするかという哲学的な領域になります。まあ、10 年前の画像解析の論文を読むとそのあたりも書いてあるのですが、最近はもっと現実解を求めて、大ざっぱに求めるというのが通例です(顔認識カメラとか、笑顔認識カメラとか)。
パズルを解くための視覚的な能力は、オプティカルフロー(オライリーの「OpenCV」の本の 335 ページ目から)にある粗いレベルでパズルのボードを認識した後に、細かいレベルで駒の動きを目で追うというアルゴリズムになりそうですね。
opencv.jp – OpenCV: オプティカルフロー(Optical flow)サンプルコード –
http://opencv.jp/sample/optical_flow.html#optflowHSLK
のあたりに移動方向を計算する方法が載っているのですが、ちとパズルを解く処理のためだけには重いかなと。パズルのボード自体はその時々では動かないので、背景の差分だけでもよいのかなぁと考えているところです。

