Onion Omega: Build Hardware with JavaScript, Python, PHP by Onion — Kickstarter
https://www.kickstarter.com/projects/onion/onion-omega-invention-platform-for-the-internet-of
Raspberry Piの4分の1でWi-Fi機能。小型ボード「Onion Omega」 | fabcross
https://fabcross.jp/news/2015/04/20150403_onion_omega.html
勢いで Kickstater で買った Onion Omaga が届きました。当時の私は Raspberry Pi と Arduino でモーターを動かして喜んでいた頃で、ともかく「1/4 のサイズで」というのに惹かれて買ってみました。まあ、何に使うかわからない感じだったので、どういう風に使うか決めてはいなかったのですが…意外とさっくりと動きます。
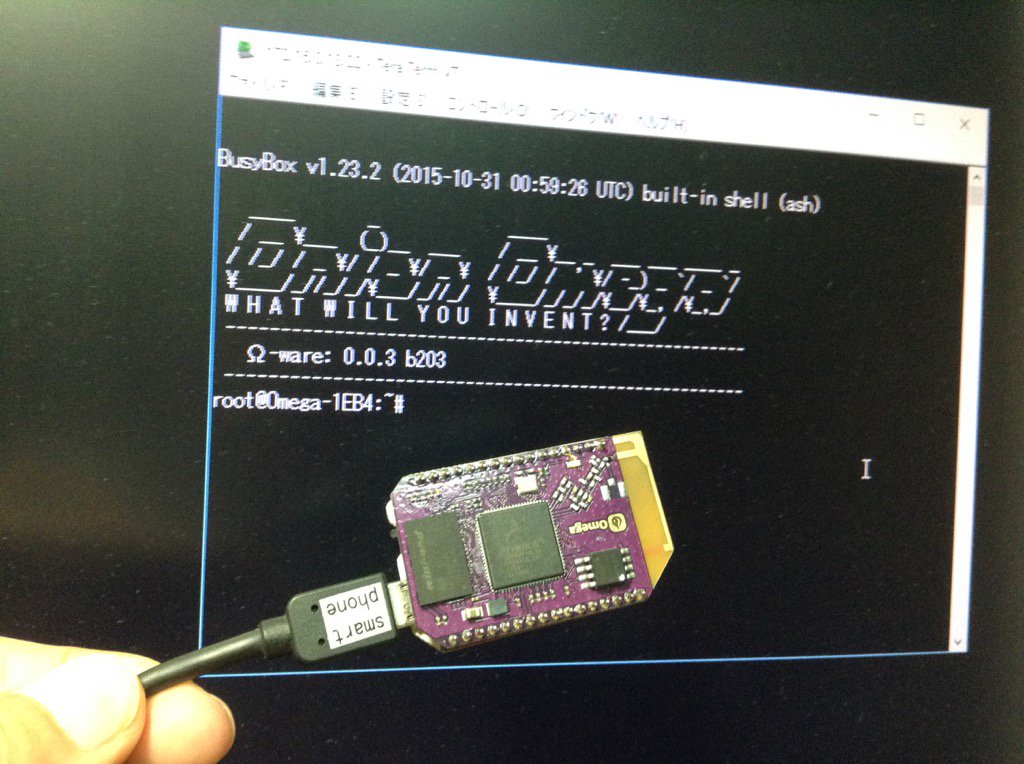
これは、セットアップした後に Tera Term で Omega に接続しているところです。中身は組込み Linux が入っているので電源を入れるだけで動きます。CPU速度やメモリ容量は Raspberry Pi 2 などよりも低いのですが、大きさが小さいのと電力が少なくて済むことです。ワットモニターで測ったところ、1.0 から 1.2W 程度で動いています。Raspberry Pi が 2.0W 程度なので半分ぐらいの電力で動きます。
大きさでは 1/4、値段は Orange Pi より高い

Omega のピン幅は 2.54mm より狭いので何らかの変換基盤が必要です。
Omega – Onion Store – Onion
https://store.onion.io/products/omega-dock?variant=7907062145
写っているのは MiniDock を加えたもので、あわせて $25 です。使い捨て…な感じでは使えないけど、Raspberry Pi 2 ほど高いわけでもないという感じですね。ただし、単に Linux ボードで実験したいだけならば、Orange Pi が $15 で手に入ります(実際は、micro SD カードが必須になるので、結果的には $25 ぐらいになるかと)。
ただし、Omega の場合は小さいので、そのまま Arduino mini 感覚でラジコンカーやロボットに載せることが可能かなと。
Onion Omega は WiFi が標準で使える
おそらく、Onion Omega の最大の特徴は、WiFi が標準で搭載されているところです。すでにボード自体に Wifi が載せられているので別の拡張ボードを買う必要がありません。単純に組込み Linux 上で何かをやらせるだけならば、先の MiniDock にある USB コネクタに電源を供給すれば ok です。
WiFi は通常のクライアント方式と、アクセスポイント方式の2つから選べます。通常はクライアントとしてネットワークに参加させておけばよいでしょう。

セッティングは USB ケーブル直結でもよいし、WiFi の設定をした後はブラウザから操作ができます。ブラウザは Firefox や Edge は動かないないので、Chrome を使っています。たぶん、内部で使っている JavaScript の関係のような気がします。
こんな感じでブラウザ上でターミナルを動かすことも可能です。

opkg で python をインストールする
中身をみていくと OpenWrt がベースになっているようです。OpenWrt は Intel Edition にも載っているそうなので、その練習用にもよいかもしれませんね。
OpenWrt – Wikipedia
https://ja.wikipedia.org/wiki/OpenWrt
パッケージのインストールは opkg コマンドでやるそうなので、opkg install python とすると python がインストールできます。結構な容量を使ってしまいますが、ちょっとした Python スクリプトを動かすぐらいだろうから、これで十分でしょう。ちなみ、私は Python は詳しくないので、これからどうやるのかよくわかりません(苦笑)。サーボモーターを動かすスクリプトを見つけてきて試してみましょう。

残念ながら opkg install mono は動かないかったので、.NET は動かないようです。.NET Core とか別途インストールすればいけますかね?
工場出荷状態に戻す
ブラウザからさっくりと工場出荷状態に戻すことができます。

というわけで、組込み Linux として使えば結構応用範囲は広いんじゃないかと思います。画像エンコード等は CPU パワー的には無理ですがカメラキットがあるので、撮影はできるようです。Rolling Spider も組込み Linux なので、このあたりも似たような感じじゃないかなと。
Mini Dock に USB コネクタがあるので、何か接続できるのかもしれません。マウスとかキーボードとか、ひょっとしたら UVC Camera とか(カメラキットが 720p WebCam になっているのでたぶんできると思う)。そのあたりの調査はおいおいに。